베벨 기어
단조, 주조 및 훨씬 덜 자주 붕대를 감습니다. 외경 치수에 따라 수십 밀리미터에서 2 ~ 3m까지 베벨 기어를 만들 수 있으며 치수 범위가 넓기 때문에 하나의 기어 설계를 사용할 수 없습니다. 베벨 기어 작동 중 기어 요소에 대한 제조 공정 및 힘 효과도 다른 설계가 필요합니다. 가장 일반적인 베벨 기어 설계는 아래에서 설명합니다.
베벨 기어 설계 선택. 베벨 기어의 디자인은 표에 따라 선택됩니다. 10.
여기에서는 원통형 기어에서와 같이 베벨 기어의 최소(d rp) 및 최대 Dgr 경계 직경의 개념을 소개합니다. 경계 지름은 기어의 디자인을 결정합니다.
디스크가 있는 기어 휠의 경우 경계 직경을 결정할 때 직경이 30mm 이상인 구멍이 디스크에 만들어져야 한다는 점을 고려해야 합니다. 이를 위해 허브와 림 사이에 50mm의 거리가 필요합니다. 가장 작은 경계 직경은 d rp = 100 + d cm + 2bsinφ여야 합니다. 따라서 d d > d r forged 베벨 기어그림 9의 시트에 표시된 디자인이어야 합니다. 3, d d ≤ d gr인 경우 기어 휠은 디스크 없이 만들어집니다(시트 9, 그림 2).
대형 캐스트 기어의 경우 최대 경계 직경 Dgp = dgp + 0.4L 개념이 도입되어 4개 및 6개의 리브가 있는 캐스트 베벨 기어의 설계를 결정합니다.
테이블에서. 그림 10은 다양한 디자인의 기어 모양을 결정하는 각도 φ의 한계를 보여줍니다.
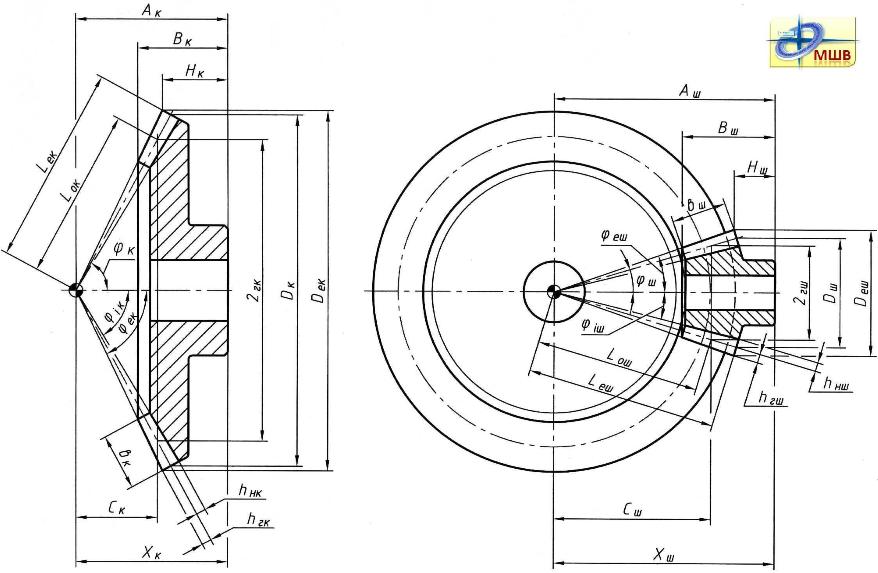
베벨 단조 기어 요소의 치수 결정. 단조 및 주조 베벨 기어 요소의 치수가 결정되는 공식은 표에 나와 있습니다. 열하나.
주요 디자인은 가로 리브가 없는 수직 디스크가 있는 기어 휠입니다. 이 디자인은 강도와 제조 가능성을 제공합니다.
표 10
베벨 기어 설계 선택
표 11
단조 및 주조 베벨 기어 요소의 치수 결정 공식

테이블의 계속. 열하나

작은 지름의 단조 기어는 디스크 없이 만들어집니다.
설계 요구 사항 또는 샤프트의 강도 조건에 따라 직경 d가 선택되어 불평등이
![]()
그런 다음 기어는 샤프트(시트 9, 그림 4, 5)와 일체형이며 기어 샤프트라고 합니다.
설계 요구 사항에 따라 단조 베벨 기어의 디스크를 허브 끝에서 일정 거리에 배치해야 하는 경우(시트 10, 그림 1) 허브가 캐비티의 원뿔 너머로 돌출되어서는 안 됩니다. 기계의 절단 치아 상태에 따라 결정됩니다.
디스크에 구멍이없고 허브의 짧은 돌출 부분이있는 베벨 기어에서 큰 원뿔 끝 쪽에서 회전하는 동안 공작물을 기계에 장착하는 편의를 위해 톱니의 상단이 따라 절단됩니다. 공작물의 질량과 돌출된 원통형 부품 허브의 길이 사이의 다음 비율을 갖는 직경 D cp:
치아의 상단을 절단할 때(시트 9, 그림 1.2) 직경 D cp는 b cp = m에서 계산된 다음 결과 값 D cp는 내림되고 치아 상단 절단의 너비 b cp는 공식에 의해 결정됩니다
![]()
각도 φ ≥ 45°(시트 9, 그림 2)로 기어 톱니(시트 9, 그림 3)의 상단을 절단할 때 절단 폭 b cp는 D cp = d d와 동일한 공식으로 결정됩니다.
캐스트 베벨 기어 요소의 치수 결정.캐스트 기어 요소의 치수는 강도뿐만 아니라 주조 공정에 의해 결정되는 이들 사이의 필요한 비율에 따라 달라집니다. 치수에 따라 리브가 4개, 6개 및 8개인 단일 디스크 기어가 생산됩니다. 짝수의 리브 선택은 이익의 가장 유리한 위치와 쉘 형태의 결함 제거 등으로 설명됩니다. 캐스트 베벨 기어 요소의 치수를 결정하는 공식은 표에 나와 있습니다. 11. 캐스트 및 단조 베벨 기어의 림 두께 δ 0을 계산하기 위해 톱니 폭 계수 ψ ba의 영향을 고려하여 캐스트 원통형 기어의 림 두께를 계산할 뿐만 아니라 공식이 채택됩니다. 총 잇수 z ∑ . 베벨 기어에서 각도 φ가 감소하면 레이디얼 하중 값이 증가하고 이 하중 적용 지점에서 디스크 대칭축까지의 거리가 증가합니다. 방사형 및 축 방향 하중으로 인한 모멘트의 영향을 줄이기 위해 작은 원뿔의 돌출부 원 끝에서 디스크까지의 거리 lX는 각도 φ에 따라 결정됩니다. 테이블에서. 도 11은 샤프트용 휠 허브의 구멍의 예비 결정을 위한 공식을 보여준다. 문자 N(시트 10, 그림 2, 3, 4)으로 표시된 위치에서 주조하는 기술을 고려하여 리브 높이까지 림을 두껍게 하는 것이 허용됩니다. 단조 및 주조 베벨 기어 제조 시 원통형 기어와 동일한 강이 사용됩니다.
강의 #8
베벨 휠은 샤프트가 교차하는 기어에 사용됩니다. 베벨 휠은 직선형, 경사형, 원형 및 기타 곡선 톱니로 만들어집니다. 현재 가장 널리 사용되는 원형 톱니가 있는 원추형 휠입니다. 스퍼 휠은 낮은 원주 속도(최대 8m/s)에서 사용하기에 적합합니다. ~에 고속더 부드러운 맞물림, 더 큰 베어링 용량 및 더 진보된 기술을 제공하는 원형 톱니가 있는 휠을 사용하는 것이 좋습니다.
베벨 기어의 단점:
1) 제조 복잡성;
2) 치아 접촉 패치 조정의 어려움;
3) 상대적으로 낮은 효율성. ( ~에= 0,94…0,97).
후자는 바퀴의 초기 원뿔의 상단이 일치하지 않으면 치아 접촉의 미끄러짐이 급격히 증가한다는 사실로 설명됩니다. 이와 관련하여 기어박스의 설계는 베벨 기어의 맞물림을 조정할 수 있는 가능성을 제공해야 합니다.
기하학적 계산의 요소
샤프트 각도 에스, 무엇이든 될 수 있지만 가장 일반적인 각도는 에스=900. 그것은 명백하다 S=d1 +d2, 어디 d1그리고 디 2 - 각각 기어와 휠의 원뿔을 나누는 각도.
외부 테이퍼 거리 답장변속기의 치수를 결정합니다(그림 8.1).
링 기어의 작동 폭 bw공식으로 표현할 수 있습니다.
b w \u003d y bd d m1 \u003d y bR Re ,
어디 ybd- 피치 직경에 대한 기어 폭 비율 - 외부 테이퍼 거리에 대한 링 기어 폭 비율 디엠- 중간 부분의 분할 직경.
 베벨 휠의 원통형 휠의 초기 및 분할 실린더 대신 분할 및 초기 실린더와 동일한 속성을 갖는 초기 및 분할 콘이라는 개념이 도입되었습니다. 기어의 모든 치수는 바깥쪽 끝에 의해 결정됩니다.
베벨 휠의 원통형 휠의 초기 및 분할 실린더 대신 분할 및 초기 실린더와 동일한 속성을 갖는 초기 및 분할 콘이라는 개념이 도입되었습니다. 기어의 모든 치수는 바깥쪽 끝에 의해 결정됩니다.
h 애 = m 테 -치두의 외부 높이;
h fe = 1,2산 e는 치아 스템의 외부 높이입니다.
mte– 외부 끝에 있는 지구 모듈;
df- 치아 공동의 원뿔 각도;
디- 치아 돌출부의 원뿔 각도;
d e = m 테 z외부 분할 원의 직경입니다.
d ae = d e +2h 비용돌출 원의 외경입니다.
d fe = d e -2h f 비용오목한 부분의 외경입니다.
베벨 기어의 피치 원 지름은 휠의 피치 원뿔 바닥 지름입니다. d e \u003d mte z \u003d 2R e sinδ,어디
길이에 따른 치아의 치수가 다르므로 중간 섹션의 직경 및 모듈러스 개념이 도입됩니다.
![]()
![]()
![]() , 어디 RM평균 원뿔 거리입니다.
, 어디 RM평균 원뿔 거리입니다.
기어비 때문에 디 1 = 2Re sind 1그리고 디 2 = 2Re sind 2, 저것. 직교 전송의 경우 에스=90 0 , 죄 디 1 =코사인 d2그리고 유= TG d2= CTG d1.
참여 노력
 베벨 스퍼 기어의 예를 사용하여 맞물리는 힘을 고려해 보겠습니다. 조건부로 모든 힘이 직경의 치아 중앙에 적용된다고 가정합니다. 디엠 1그리고 d m 2(그림 8.3 참조). 비행기 섹션에서 " n-n” 정상적인 치아 표면은 전체 힘에 의해 영향을 받습니다. 에프엔원주 방향 힘으로 분해됩니다. 에프티그리고 노력 정말로". 차례로, 노력 정말로"정면 평면에서 그것은 다음으로 분해된다. 파(축력) 및 정말로(방사력). 모든 힘을 결정하기 위해 초기 힘은 다음과 같습니다.
베벨 스퍼 기어의 예를 사용하여 맞물리는 힘을 고려해 보겠습니다. 조건부로 모든 힘이 직경의 치아 중앙에 적용된다고 가정합니다. 디엠 1그리고 d m 2(그림 8.3 참조). 비행기 섹션에서 " n-n” 정상적인 치아 표면은 전체 힘에 의해 영향을 받습니다. 에프엔원주 방향 힘으로 분해됩니다. 에프티그리고 노력 정말로". 차례로, 노력 정말로"정면 평면에서 그것은 다음으로 분해된다. 파(축력) 및 정말로(방사력). 모든 힘을 결정하기 위해 초기 힘은 다음과 같습니다.
그것을 통해 노력이 결정됩니다

바퀴의 경우 힘의 방향이 반대인 반면
![]()
등가 휠 및 매개 변수 결정
 베벨 기어 톱니 단면의 치수는 원뿔 상단에서 이 단면의 거리에 비례하여 변경됩니다. 치아의 모든 단면은 기하학적으로 유사합니다. 동시에 특정 부하 큐(그림 8.4) 치아 길이에 따라 고르지 않게 분포됩니다. 분할 원뿔의 상단과 일치하는 삼각형의 법칙에 따라 다양한 섹션에서 변형의 크기와 치아의 강성에 따라 다릅니다. 접촉 및 굽힘 응력은 치아의 전체 길이에 걸쳐 동일합니다. 이를 통해 모든 섹션의 강도를 계산할 수 있습니다. 하중이 있는 치아의 평균 단면을 계산된 단면으로 가져가는 것이 실질적으로 편리합니다. q 참조.
베벨 기어 톱니 단면의 치수는 원뿔 상단에서 이 단면의 거리에 비례하여 변경됩니다. 치아의 모든 단면은 기하학적으로 유사합니다. 동시에 특정 부하 큐(그림 8.4) 치아 길이에 따라 고르지 않게 분포됩니다. 분할 원뿔의 상단과 일치하는 삼각형의 법칙에 따라 다양한 섹션에서 변형의 크기와 치아의 강성에 따라 다릅니다. 접촉 및 굽힘 응력은 치아의 전체 길이에 걸쳐 동일합니다. 이를 통해 모든 섹션의 강도를 계산할 수 있습니다. 하중이 있는 치아의 평균 단면을 계산된 단면으로 가져가는 것이 실질적으로 편리합니다. q 참조.
강도를 계산하기 위해 베벨 휠은 동등한 원통형 휠로 대체되며 치수는 추가 원뿔의 개발에 의해 결정됩니다. 제이, 중간 섹션(그림 8.5)에서 엠티비 = 엠티엠.
등가 휠 직경
![]()
페이지 1
원형 치아는 치아를 절단할 때 도구가 이동하는 원호를 따라 위치합니다. 원형 톱니의 경사각은 가변적입니다.
원형 치아는 일반적으로 중간 발정기 A에서 치아 라인에 접하도록 만들어집니다(그림.
원형 톱니는 커터 헤드가 있는 특수 고성능 기계에서 작동하여 절단됩니다.
강도 측면에서 원형 치아는 원호 모양과 한 점에서의 초기 접촉에서 직선 및 나선형 치아와 다릅니다.
강도 측면에서 원형 치아는 원호 모양과 한 점에서의 초기 접촉에서 직선 및 경사 치아와 다릅니다.
강도 측면에서 원형 치아는 원호 모양과 한 지점에서의 초기 접촉에서 직선 치아와 다릅니다. 이러한 능력의 영향은 잘 알려져 있지 않지만 실험 데이터를 기반으로 원형 톱니가 있는 베벨 기어가 동일한 치수의 스퍼 베벨 기어보다 145배 더 큰 하중을 전달할 수 있다는 것이 입증되었습니다.
원형 톱니는 테이퍼 거리 L 6 - - - 420mm와 함께 사용할 수 있습니다.
원형 치아는 치아를 절단할 때 도구가 이동하는 원호를 따라 위치합니다.
| 베벨 기어의 기하학적 계산 방식.| 베벨 기어 이빨의 모양. |
원형 치아는 모듈의 특정 범위에서 치아를 절단할 수 있는 비모듈식 도구로 절단됩니다. 따라서 비표준 및 분수 모듈과 함께 전송을 사용할 수 있습니다.
강도 측면에서 원형 치아는 원호 모양과 한 점에서의 초기 접촉에서 직선 및 나선형 치아와 다릅니다. 따라서 소련과 해외에서는 Gleason 기어 절단기 회사에서 개발 한 원형 톱니 AGMA가있는 베벨 기어의 특수 계산이 널리 사용됩니다. 굉장한 경험베벨 기어의 설계, 제조 및 테스트. 이러한 계산은 제시된 것과 동일한 근거를 갖지만 몇 가지 특정 기능도 있습니다.
원형 치아는 치아를 절단할 때 도구가 이동하는 원호를 따라 위치합니다. 원형 톱니의 경사각은 가변적입니다. 계산된 각도는 휠의 평균 직경 원주 각도로 간주됩니다.
스퍼 베벨휠은 낮은 원주 속도로 사용됩니다(최대 2 ~ 3m/s, 최대 8m/s 허용). 더 빠른 속도에서는 더 부드러운 기어링, 더 적은 소음, 더 큰 지지력 및 더 진보된 기술을 제공하는 원형 톱니가 있는 휠을 사용하는 것이 좋습니다. 박차베벨 기어는 최대 3의 기어비를 제공합니다.
|
3m / s보다 큰 주변 속도에서 기어 비스듬한또는 곡선의점진적인 맞물림과 맞물림 과정에서 치아 변형량의 작은 변화로 인해 소음이 적고 동적 부하가 적은 치아. 또한 톱니바퀴 비스듬한또는 곡선의치아는 박차 치아보다 굽힘에서 더 잘 작동합니다. 그러나 이러한 기어의 톱니가 완전히 접촉하려면 톱니의 폭뿐만 아니라 높이도 맞아야 하므로 톱니가 휘어진 헬리컬 기어 및 휠의 제조에 대한 요구 사항이 증가합니다. 장점으로 인해 이러한 기어는 최대 5 이상의 기어비와 함께 사용할 수 있습니다. |
그림 5 ㅏ)곧은 이빨을 가진 비)비스듬한 이빨을 가진 V)구부러진 치아 G)베벨 하이포이드 기어 |
|
그림 6 - 베벨 기어 톱니의 주요 요소 |
비스듬한 베벨 기어치아는 최대 12m / s의 주변 속도로 작동 할 수 있으며 휠은 곡선의치아 - 최대 35-40m/s. 톱니가 나선형으로 잘린 톱니가 있는 기어, 인벌루트(팔로이드) 또는 원형(원형)이 가장 널리 사용되며, 톱니가 휘어진 베벨 기어는 나선형의 방향이 다를 수 있습니다. 톱니가 원뿔의 상단 측면에서 시계 방향으로 움직이는 방향으로 바깥쪽으로 기울어지면 기어 휠을 오른 손잡이라고합니다. 그렇지 않으면 바퀴를 왼손잡이라고합니다. |

베벨 기어의 수정
주로 사용 고층 건물원추형 바퀴의 수정 (수정). 베벨 휠에도 사용 접하는기어 톱니가 두꺼워지고 휠 톱니가 얇아지는 보정. 베벨 휠의 접선 수정에는 특별한 도구가 필요하지 않습니다. 원통형 휠의 경우 특수 도구가 필요하므로 접선 수정이 사용되지 않습니다. 실제로 베벨 휠의 경우 높이 수정은 종종 접선 수정과 함께 사용됩니다.
길이에 따른 섹션 크기의 변화에 따라 베벨 기어의 톱니는 세 가지 형태를 수행합니다.
|
그림 7 |
1. 일반적으로 치아를 낮추는 것.분할 원뿔과 내부 원뿔의 정점이 일치합니다. 이 형태는 직선 및 접선 톱니가 있는 베벨 기어에 사용되며 mn>2 및 Z = 20...100인 원형 톱니가 있는 기어에도 제한적으로 사용됩니다. |
그림 8 |
2. 내부 콘의 상단은 휠 캐비티 하단의 너비가 일정하고 상단까지의 거리가 증가함에 따라 분할 콘을 따라 톱니의 두께가 증가하도록 위치합니다. 이 모양을 사용하면 한 번에 하나의 도구로 휠 톱니의 양면을 처리할 수 있습니다. 따라서 원형 톱니가 있는 바퀴의 기초가 됩니다. |
그림 9 |
3. 높은 치아가 동일합니다.분할 및 내부 콘의 생성기는 병렬입니다. 이 모양은 Z>40, 특히 평균 테이퍼 거리가 75-750mm인 원형 톱니에 사용됩니다. |
개발 컴퓨터 프로그램원형 톱니가 있는 원추형 쌍 설계용.
원형 및 하이포이드 치아가 있는 원추형 쌍의 수리(단일) 생산에서 기본으로 간주할 때사용 가능,그러나 이미 마모, 손상 및 고장난 쌍의 경우 기하학적 매개변수의 계산 및 결정에 강도, 내하중 용량 및 작동 안정성에 대한 특별한 지루한 계산이 필요하지 않습니다. 이 모든 것은 한 번에 그들이 의도한 장치와 기계를 설계하는 단계에서 이미 수행되었습니다. 따라서 "귀찮게"하고 시간을 낭비하지 마십시오.쌍에 대한 적절한 재료 선택과 열처리 유형에 따라 모든 것이 제한됩니다. 그리고 이것은 간단하게 해결됩니다. 더 강한 것을 원한다면 적절한 재료, 시멘트, 질화물, 경화를 선택하십시오. 필요하지 않음 - 일반 구조용 강철을 사용하십시오. 그리고 때때로 일반적으로 재료 선택은 현재 기업의 기능에 의해 제한됩니다. 더 나은 것을 원하지만 아무것도 아닙니다. 기본 작업은 쌍의 매개 변수를 빠르고 정확하게 재현하고 고품질로 생산하는 것입니다.
또한 수리 생산에서 원추형 쌍을 절단하는 데 사용되는 절단 성형 도구(기어 헤드)를 사용하는 문제가 해결되고 있습니다. 그들이 가지고 있는 도구를 사용하십시오. 따라서 기하 매개변수를 계산할 때 도구도 고려할 수 없습니다.주목.물론 프로그램에서 권장하지만 해당 설치 차트의 추가 계산 중에 최종적으로 결정되고 수락됩니다.
따라서 우리 프로그램의 장점은 다음과 같습니다. 그들은 그들과 함께 일할 필요가 없습니다예비의관련 전문가의 참여로 교육. 대화 중 프로그램, 초기 데이터 입력, 그들은 항상 사용자의 행동을 수정하여 허용 가능한 값의 경계를 제안하여 잘못된 값을 입력하는 것을 허용하지 않으며 궁극적으로 부조리와 계산 시작으로 돌아갑니다., 다른 제안된 프로그램에서 발생하는 것처럼. 위에서 언급한 것처럼 불필요한 초기 데이터가 없으므로 귀중한 시간이 많이 걸리고 궁극적으로 혼란스럽고 필요한 결과를 제공하지 않습니다(계산은 제쳐두고). 동시에 당사의 프로그램은 원형 및 하이포이드 톱니가 있는 계산된 베벨 쌍의 레이아웃 및 설치 매개변수를 포함하여 더 많은 양의 최종 계산된 정보를 제공합니다. 제조 및 성능에 그다지 중요하지 않은 것.
원추형 쌍 설계용 프로그램
1번과 2번 원형 치아 형태.
이 프로그램을 사용하면 디자인할 때 입력할 수 있습니다.기어 쌍에 대한 서양 표준을 고려한 맨드릴. 이를 통해 마모되고 손상된 기어 쌍에서 제조에 필요한 모든 기하학적 매개변수를 복원하고 계산할 수 있습니다.
양식 1
프로그램에 의한 계산의 예: