วิธีเขียนสมการออสซิลเลชันฮาร์มอนิก การสั่นสะเทือนฮาร์มอนิกและคุณลักษณะของมัน
ประเภทการสั่นสะเทือนที่ง่ายที่สุดคือ การสั่นสะเทือนฮาร์มอนิก- ความผันผวนซึ่งการกระจัดของจุดสั่นจากตำแหน่งสมดุลเปลี่ยนแปลงตามเวลาตามกฎของไซน์หรือโคไซน์
ดังนั้นด้วยการหมุนที่สม่ำเสมอของลูกบอลรอบเส้นรอบวง การฉายภาพ (เงาในรังสีคู่ขนาน) จะทำการเคลื่อนที่แบบฮาร์มอนิกออสซิลเลเตอร์บนหน้าจอแนวตั้ง (รูปที่ 1)
การกระจัดจากตำแหน่งสมดุลระหว่างการสั่นสะเทือนฮาร์มอนิกอธิบายโดยสมการ (เรียกว่ากฎจลน์ของการเคลื่อนที่ฮาร์มอนิก) ในรูปแบบ:
โดยที่ x คือการกระจัด - ปริมาณที่แสดงลักษณะของจุดสั่น ณ เวลา t สัมพันธ์กับตำแหน่งสมดุล และวัดโดยระยะห่างจากตำแหน่งสมดุลไปยังตำแหน่งของจุด ณ เวลาที่กำหนด เอ - แอมพลิจูดของการสั่น - การกระจัดสูงสุดของร่างกายจากตำแหน่งสมดุล T - ระยะเวลาการสั่น - เวลาของการสั่นที่สมบูรณ์หนึ่งครั้ง เหล่านั้น. ช่วงเวลาที่สั้นที่สุดหลังจากนั้นจะทำซ้ำค่าของปริมาณทางกายภาพที่แสดงถึงการสั่น - ระยะเริ่มแรก
![]()
เฟสของการสั่น ณ เวลา t เฟสการสั่นเป็นข้อโต้แย้งของฟังก์ชันคาบ ซึ่งสำหรับแอมพลิจูดของการสั่นที่กำหนด จะกำหนดสถานะของระบบการสั่น (การกระจัด ความเร็ว ความเร่ง) ของร่างกายในเวลาใดก็ได้
หาก ณ เวลาเริ่มต้น จุดแกว่งตัวถูกแทนที่จนสุดจากตำแหน่งสมดุล ดังนั้น และการกระจัดของจุดจากตำแหน่งสมดุลจะเปลี่ยนไปตามกฎหมาย
![]()
หากจุดสั่น ณ อยู่ในตำแหน่งสมดุลเสถียร การกระจัดของจุดจากตำแหน่งสมดุลจะเปลี่ยนไปตามกฎหมาย
![]()
ค่า V ซึ่งเป็นค่าผกผันของคาบและเท่ากับจำนวนการสั่นที่สมบูรณ์ใน 1 วินาที เรียกว่าความถี่การสั่น:
ถ้าในช่วงเวลา t ร่างกายทำให้การแกว่งของ N สมบูรณ์แล้ว
![]()
ขนาด ![]() เรียกว่าการแสดงจำนวนการแกว่งของร่างกายใน s ความถี่วงจร (วงกลม).
เรียกว่าการแสดงจำนวนการแกว่งของร่างกายใน s ความถี่วงจร (วงกลม).
กฎจลนศาสตร์ของการเคลื่อนที่ฮาร์มอนิกสามารถเขียนได้เป็น:
ในเชิงกราฟิก การพึ่งพาของการกระจัดของจุดที่สั่นตรงเวลาจะแสดงด้วยคลื่นโคไซน์ (หรือคลื่นไซน์)
รูปที่ 2 a แสดงกราฟของการขึ้นต่อเวลาของการกระจัดของจุดสั่นจากตำแหน่งสมดุลของเคส

เรามาดูกันว่าความเร็วของจุดสั่นเปลี่ยนแปลงตามเวลาอย่างไร ในการทำเช่นนี้ เราจะหาอนุพันธ์ของเวลาของนิพจน์นี้:
โดยที่แอมพลิจูดของการฉายภาพความเร็วบนแกน x คือ
สูตรนี้แสดงให้เห็นว่าในระหว่างการออสซิลเลชันฮาร์มอนิก การฉายภาพความเร็วของร่างกายบนแกน x ก็เปลี่ยนแปลงไปตามกฎฮาร์มอนิกที่มีความถี่เท่ากันด้วยแอมพลิจูดที่แตกต่างกันและอยู่ข้างหน้าการกระจัดในเฟสด้วย (รูปที่ 2, b ).
เพื่อชี้แจงความขึ้นอยู่กับความเร่ง เราจะหาอนุพันธ์ของเวลาของการฉายภาพความเร็ว:
โดยที่คือแอมพลิจูดของการฉายภาพความเร่งบนแกน x
ด้วยการสั่นแบบฮาร์มอนิก การฉายภาพความเร่งจะอยู่ข้างหน้าการกระจัดของเฟสด้วย k (รูปที่ 2, c)
ในทำนองเดียวกัน คุณสามารถสร้างกราฟการพึ่งพาได้

สมการการสั่นสะเทือนฮาร์มอนิก
สมการของการสั่นของฮาร์มอนิกทำให้เกิดการพึ่งพาพิกัดของร่างกายตรงเวลา


กราฟโคไซน์ในช่วงเริ่มต้นมีค่าสูงสุด และกราฟไซน์มีค่าเป็นศูนย์ในช่วงเริ่มต้น หากเราเริ่มตรวจสอบการสั่นจากตำแหน่งสมดุล การสั่นจะเกิดไซนัสอยด์ซ้ำ หากเราเริ่มพิจารณาการสั่นจากตำแหน่งส่วนเบี่ยงเบนสูงสุด การสั่นจะถูกอธิบายด้วยโคไซน์ หรือการสั่นดังกล่าวสามารถอธิบายได้ด้วยสูตรไซน์ที่มีเฟสเริ่มต้น
การเปลี่ยนแปลงความเร็วและความเร่งระหว่างการสั่นฮาร์มอนิก
ไม่เพียงแต่พิกัดของร่างกายจะเปลี่ยนแปลงตามเวลาตามกฎของไซน์หรือโคไซน์เท่านั้น แต่ปริมาณเช่นแรง ความเร็ว และความเร่งก็เปลี่ยนแปลงไปในทำนองเดียวกัน แรงและความเร่งจะสูงสุดเมื่อวัตถุที่สั่นอยู่ในตำแหน่งสุดขีดซึ่งมีการกระจัดสูงสุด และเป็นศูนย์เมื่อวัตถุผ่านตำแหน่งสมดุล ในทางตรงกันข้าม ความเร็วในตำแหน่งสุดขั้วจะเป็นศูนย์ และเมื่อร่างกายผ่านตำแหน่งสมดุล ก็จะถึงค่าสูงสุด
ถ้าการสั่นอธิบายตามกฎของโคไซน์


หากอธิบายการสั่นตามกฎไซน์


ค่าความเร็วและความเร่งสูงสุด
เมื่อวิเคราะห์สมการการพึ่งพา v(t) และ a(t) เราสามารถเดาได้ว่าความเร็วและความเร่งจะใช้ค่าสูงสุดในกรณีที่ปัจจัยตรีโกณมิติเท่ากับ 1 หรือ -1 กำหนดโดยสูตร
การสั่นสะเทือนทางกล พารามิเตอร์การสั่น การสั่นสะเทือนแบบฮาร์มอนิก
ลังเล เป็นกระบวนการที่เกิดซ้ำอย่างแน่นอนหรือโดยประมาณในช่วงเวลาหนึ่ง
ลักษณะเฉพาะของการแกว่งคือการมีตำแหน่งสมดุลที่มั่นคงบนวิถีซึ่งผลรวมของแรงทั้งหมดที่กระทำต่อร่างกายเท่ากับศูนย์เรียกว่าตำแหน่งสมดุล
ลูกตุ้มทางคณิตศาสตร์คือจุดวัสดุที่แขวนอยู่บนเส้นด้ายที่บาง ไร้น้ำหนัก และไม่สามารถยืดออกได้
พารามิเตอร์ของการเคลื่อนที่แบบสั่น
1. ออฟเซ็ตหรือประสานงาน (x) - การเบี่ยงเบนไปจากตำแหน่งสมดุลในตำแหน่งที่กำหนด
ช่วงเวลาหนึ่ง | [x ]=ม | |
2. แอมพลิจูด ( Xm) – ส่วนเบี่ยงเบนสูงสุดจากตำแหน่งสมดุล
[ เอ็กซ์ ม ]=ม
3. ระยะเวลาการสั่น ( ต) - เวลาที่ใช้ในการสั่นจนเสร็จสมบูรณ์หนึ่งครั้ง
[ต ]=ค.
0 " style="margin-left:31.0pt;border-collapse:collapse">
ลูกตุ้มคณิตศาสตร์
ลูกตุ้มสปริง
ม
https://pandia.ru/text/79/117/images/image006_26.gif" width="134" height="57 src="> ความถี่ (เชิงเส้น) ( n ) – จำนวนการสั่นที่สมบูรณ์ใน 1 วินาที
[น]= เฮิรตซ์
5. ความถี่วงจร (ว ) – จำนวนการสั่นที่สมบูรณ์ใน 2p วินาที เช่น ในเวลาประมาณ 6.28 วินาที
![]()
w = 2pn ; [w] =0 " style="margin-left:116.0pt;border-collapse:collapse">

https://pandia.ru/text/79/117/images/image012_9.jpg" width="90" height="103">
เงาบนหน้าจอสั่นไหว
สมการและกราฟของการสั่นสะเทือนฮาร์มอนิก
การสั่นสะเทือนแบบฮาร์มอนิก - สิ่งเหล่านี้คือการแกว่งซึ่งพิกัดเปลี่ยนแปลงตามเวลาตามกฎของไซน์หรือโคไซน์
https://pandia.ru/text/79/117/images/image014_7.jpg" width="254" height="430 src="> x=เอ็กซ์มบาป(ว ที+เจ 0 )
x=เอ็กซ์มเพราะ(ว ที+เจ 0 )
x – พิกัด
Xm - แอมพลิจูดการสั่นสะเทือน
w – ความถี่วงจร
wt +j 0 = j – เฟสการสั่น
เจ 0 – ระยะเริ่มต้นของการสั่น
https://pandia.ru/text/79/117/images/image016_4.jpg" width="247" height="335 src=">
กราฟมีความแตกต่างกัน เท่านั้นแอมพลิจูด
กราฟต่างกันเฉพาะช่วง (ความถี่)
https://pandia.ru/text/79/117/images/image018_3.jpg" width="204" height="90 src=">
หากแอมพลิจูดของการแกว่งไม่เปลี่ยนแปลงเมื่อเวลาผ่านไป การแกว่งจะถูกเรียก ไม่อับชื้น.

การสั่นสะเทือนตามธรรมชาติไม่คำนึงถึงแรงเสียดทาน พลังงานกลทั้งหมดของระบบยังคงที่: อีเค + อีน= อีขน = const
การสั่นตามธรรมชาติไม่มีการลดทอน
เมื่อใช้การสั่นแบบบังคับ พลังงานที่จ่ายอย่างต่อเนื่องหรือเป็นระยะจากแหล่งภายนอกจะชดเชยการสูญเสียที่เกิดขึ้นเนื่องจากการทำงานของแรงเสียดทาน และการสั่นนั้นสามารถไม่ทำให้หมาด ๆ ได้
พลังงานจลน์และพลังงานศักย์ของร่างกายจะเปลี่ยนเป็นพลังงานอื่นระหว่างการสั่นสะเทือน เมื่อค่าเบี่ยงเบนของระบบจากตำแหน่งสมดุลมีค่าสูงสุด พลังงานศักย์จะสูงสุด และพลังงานจลน์จะเป็นศูนย์ เมื่อผ่านตำแหน่งสมดุลก็เป็นอีกทางหนึ่ง
ความถี่ของการแกว่งอิสระถูกกำหนดโดยพารามิเตอร์ของระบบออสซิลเลชั่น
ความถี่ของการสั่นแบบบังคับถูกกำหนดโดยความถี่ของแรงภายนอก แอมพลิจูดของการสั่นแบบบังคับยังขึ้นอยู่กับแรงภายนอกด้วย
เสียงก้อง ค
 เสียงก้อง
เรียกว่าการเพิ่มขึ้นอย่างรวดเร็วของแอมพลิจูดของการสั่นแบบบังคับเมื่อความถี่ของแรงภายนอกเกิดขึ้นพร้อมกับความถี่ของการสั่นตามธรรมชาติของระบบ
เสียงก้อง
เรียกว่าการเพิ่มขึ้นอย่างรวดเร็วของแอมพลิจูดของการสั่นแบบบังคับเมื่อความถี่ของแรงภายนอกเกิดขึ้นพร้อมกับความถี่ของการสั่นตามธรรมชาติของระบบ
เมื่อความถี่ w ของแรงเปลี่ยนแปลงไปพร้อมๆ กันกับความถี่ธรรมชาติ w0 ของการแกว่งของระบบ แรงจะทำงานเชิงบวกตลอด โดยจะเพิ่มแอมพลิจูดของการแกว่งของร่างกาย ที่ความถี่อื่นๆ ระหว่างช่วงหนึ่งของคาบ แรงจะทำงานเชิงบวก และในช่วงอื่นๆ ของคาบ แรงทำงานเชิงลบ
ในระหว่างการสั่นพ้อง การเพิ่มแอมพลิจูดของการสั่นอาจนำไปสู่การทำลายระบบได้
ในปี 1905 สะพานอียิปต์ข้ามแม่น้ำ Fontanka ในเซนต์ปีเตอร์สเบิร์กพังทลายลงภายใต้กีบของกองทหารม้า
การสั่นด้วยตนเอง
การสั่นไหวในตัวเองคือการสั่นที่ไม่มีการหน่วงในระบบ ซึ่งได้รับการสนับสนุนโดยแหล่งพลังงานภายใน หากไม่มีอิทธิพลจากการเปลี่ยนแปลงแรงภายนอก
แตกต่างจากการบังคับออสซิลเลชัน ความถี่และแอมพลิจูดของการสั่นในตัวเองถูกกำหนดโดยคุณสมบัติของระบบออสซิลเลชันเอง
การแกว่งตัวเองแตกต่างจากการแกว่งอิสระโดยความเป็นอิสระของแอมพลิจูดจากเวลา และจากอิทธิพลระยะสั้นเริ่มต้นที่กระตุ้นกระบวนการแกว่ง ระบบการสั่นในตัวเองมักจะแบ่งออกเป็นสามองค์ประกอบ:
1) ระบบสั่น;
2) แหล่งพลังงาน
3) อุปกรณ์ป้อนกลับที่ควบคุมการไหลของพลังงานจากแหล่งกำเนิดเข้าสู่ระบบออสซิลเลเตอร์
พลังงานที่มาจากแหล่งกำเนิดในช่วงเวลาหนึ่งจะเท่ากับพลังงานที่สูญเสียไปในระบบออสซิลเลชันในช่วงเวลาเดียวกัน
เราตรวจสอบระบบที่แตกต่างกันโดยสิ้นเชิงทางกายภาพหลายระบบ และตรวจสอบให้แน่ใจว่าสมการการเคลื่อนที่ถูกลดทอนให้อยู่ในรูปแบบเดียวกัน
ความแตกต่างระหว่างระบบทางกายภาพจะปรากฏเฉพาะในคำจำกัดความที่ต่างกันของปริมาณเท่านั้น และความรู้สึกทางกายภาพที่แตกต่างกันของตัวแปร x: นี่อาจเป็นพิกัด มุม ประจุ กระแส ฯลฯ โปรดทราบว่าในกรณีนี้ จากโครงสร้างสมการ (1.18) ต่อไปนี้ ปริมาณจะมีมิติของเวลาผกผันเสมอ
สมการ (1.18) อธิบายสิ่งที่เรียกว่า การสั่นสะเทือนฮาร์มอนิก.
สมการการสั่นสะเทือนฮาร์มอนิก (1.18) เป็นสมการเชิงอนุพันธ์เชิงเส้นอันดับสอง (เนื่องจากมีอนุพันธ์อันดับสองของตัวแปร x). ความเป็นเส้นตรงของสมการหมายความว่าอย่างนั้น
ถ้าฟังก์ชั่นบางอย่าง เอ็กซ์(ที)คือคำตอบของสมการนี้ แล้วก็ฟังก์ชัน ซีเอ็กซ์(ที)จะเป็นทางออกของเขาด้วย ( ค– ค่าคงที่ตามอำเภอใจ);
ถ้าฟังก์ชั่น x 1(ท)และ x 2(ท)คือคำตอบของสมการนี้ แล้วจึงผลรวม x 1 (เสื้อ) + x 2 (เสื้อ)จะเป็นคำตอบของสมการเดียวกันด้วย
ทฤษฎีบททางคณิตศาสตร์ยังได้รับการพิสูจน์แล้ว โดยสมการอันดับสองมีคำตอบที่เป็นอิสระสองข้อ สารละลายอื่นๆ ทั้งหมดตามคุณสมบัติของความเป็นเชิงเส้นสามารถหาได้จากผลรวมเชิงเส้น ง่ายต่อการตรวจสอบโดยการหาอนุพันธ์โดยตรงว่าฟังก์ชันอิสระและเป็นไปตามสมการ (1.18) ซึ่งหมายความว่าคำตอบทั่วไปของสมการนี้มีรูปแบบดังนี้
ที่ไหน ค 1ค 2- ค่าคงที่ตามอำเภอใจ วิธีนี้สามารถนำเสนอในรูปแบบอื่นได้ มาใส่ค่ากัน
|
|
และกำหนดมุมตามความสัมพันธ์:
|
|

จากนั้นคำตอบทั่วไป (1.19) เขียนเป็น
ตามสูตรตรีโกณมิติ นิพจน์ในวงเล็บจะเท่ากับ
ในที่สุดเราก็มาถึง คำตอบทั่วไปของสมการการสั่นสะเทือนฮาร์มอนิกเช่น:
ค่าที่ไม่เป็นลบ กเรียกว่า แอมพลิจูดการสั่นสะเทือน, - ระยะเริ่มต้นของการสั่น. อาร์กิวเมนต์โคไซน์ทั้งหมด - การรวมกัน - เรียกว่า เฟสการสั่น.
นิพจน์ (1.19) และ (1.23) เทียบเท่ากันโดยสมบูรณ์ ดังนั้นเราจึงสามารถใช้นิพจน์ใดก็ได้ โดยพิจารณาจากความเรียบง่าย คำตอบทั้งสองเป็นฟังก์ชันคาบของเวลา อันที่จริงไซน์และโคไซน์นั้นมีคาบเป็นคาบ . ดังนั้น สถานะต่างๆ ของระบบที่มีการสั่นแบบฮาร์มอนิกจะเกิดขึ้นซ้ำหลังจากช่วงระยะเวลาหนึ่ง เสื้อ*ซึ่งในระหว่างนั้นเฟสการสั่นจะได้รับการเพิ่มขึ้นซึ่งเป็นผลคูณของ :
มันเป็นไปตามนั้น
อย่างน้อยครั้งนี้
เรียกว่า ระยะเวลาของการสั่น (รูปที่ 1.8) และ - ของเขา วงกลม (วงจร) ความถี่.
ข้าว. 1.8.
พวกเขายังใช้ ความถี่ ความผันผวน
|
|
ดังนั้น ความถี่วงกลมจึงเท่ากับจำนวนการแกว่งต่อ วินาที
ดังนั้นหากระบบในขณะนั้น ทีโดดเด่นด้วยค่าของตัวแปร x(เสื้อ)จากนั้นตัวแปรจะมีค่าเท่ากันหลังจากช่วงระยะเวลาหนึ่ง (รูปที่ 1.9) กล่าวคือ
![]()
แน่นอนว่าค่าเดียวกันนั้นจะถูกทำซ้ำหลังจากนั้นไม่นาน 2ต, ซีทีฯลฯ

ข้าว. 1.9. ระยะเวลาการสั่น
วิธีแก้ปัญหาทั่วไปประกอบด้วยค่าคงที่ตามอำเภอใจสองตัว ( ค 1, ค 2หรือ ก, ก) ค่าที่ควรถูกกำหนดโดยสอง เงื่อนไขเริ่มต้น. โดยปกติ (แต่ไม่จำเป็น) บทบาทของพวกเขาจะเล่นตามค่าเริ่มต้นของตัวแปร x(0)และอนุพันธ์ของมัน
ลองยกตัวอย่าง ให้คำตอบ (1.19) ของสมการออสซิลเลชันฮาร์มอนิกอธิบายการเคลื่อนที่ของลูกตุ้มสปริง ค่าของค่าคงที่ตามอำเภอใจขึ้นอยู่กับวิธีที่เรานำลูกตุ้มออกจากสมดุล เช่น เราดึงสปริงไปไกลๆ และปล่อยบอลโดยไม่มีความเร็วเริ่มต้น ในกรณีนี้

การทดแทน เสื้อ = 0ใน (1.19) เราจะหาค่าของค่าคงที่ ค 2
![]()
วิธีแก้ปัญหาจึงมีลักษณะดังนี้:
ความเร็วของโหลดพบได้จากความแตกต่างตามเวลา
![]()
เข้ามาทดแทนที่นี่. ที = 0 จงหาค่าคงที่ ค 1:
![]()
ในที่สุด
![]()
เมื่อเปรียบเทียบกับ (1.23) เราจะพบว่า คือแอมพลิจูดของการแกว่ง และเฟสเริ่มต้นคือศูนย์:
ให้เราทำให้ลูกตุ้มสมดุลในอีกทางหนึ่ง ลองตีโหลดเพื่อให้ได้ความเร็วเริ่มต้น แต่ในทางปฏิบัติแล้วจะไม่เคลื่อนที่ระหว่างการกระแทก จากนั้นเราก็มีเงื่อนไขเริ่มต้นอื่นๆ:

![]()
โซลูชันของเราดูเหมือน
![]()
ความเร็วของการโหลดจะเปลี่ยนไปตามกฎหมาย:
![]()
มาแทนที่ที่นี่:
![]()
หัวข้อของตัวประมวลผลการตรวจสอบ Unified State: การสั่นสะเทือนฮาร์มอนิก; แอมพลิจูด คาบ ความถี่ เฟสของการสั่น การสั่นสะเทือนแบบอิสระ, การสั่นแบบบังคับ, เสียงสะท้อน
การสั่น - สิ่งเหล่านี้คือการเปลี่ยนแปลงสถานะของระบบที่เกิดขึ้นซ้ำๆ เมื่อเวลาผ่านไป แนวคิดของการแกว่งครอบคลุมปรากฏการณ์ต่างๆ มากมาย
การสั่นสะเทือนของระบบเครื่องกลหรือ การสั่นสะเทือนทางกล- คือการเคลื่อนไหวทางกลของร่างกายหรือระบบของร่างกายซึ่งสามารถทำซ้ำได้ทันเวลาและเกิดขึ้นในบริเวณใกล้เคียงกับตำแหน่งสมดุล ตำแหน่งสมดุลคือสภาวะของระบบที่สามารถดำรงอยู่ได้ไม่จำกัดโดยไม่ได้รับอิทธิพลจากภายนอก
ตัวอย่างเช่น ถ้าลูกตุ้มถูกเบี่ยงเบนและปล่อย ลูกตุ้มก็จะเริ่มแกว่ง ตำแหน่งสมดุลคือตำแหน่งของลูกตุ้มในกรณีที่ไม่มีการโก่งตัว หากปล่อยทิ้งไว้โดยไม่ถูกรบกวน ลูกตุ้มสามารถอยู่ในตำแหน่งนี้ได้นานเท่าที่ต้องการ เมื่อลูกตุ้มแกว่ง มันจะผ่านตำแหน่งสมดุลหลายครั้ง
ทันทีที่ปล่อยลูกตุ้มที่เบนออกไป มันก็เริ่มเคลื่อนที่ ผ่านตำแหน่งสมดุล ไปถึงตำแหน่งสุดขั้วตรงข้าม หยุดอยู่ครู่หนึ่ง เคลื่อนไปในทิศทางตรงกันข้าม ผ่านตำแหน่งสมดุลอีกครั้งแล้วกลับมา มีสิ่งหนึ่งที่เกิดขึ้น แกว่งเต็มที่. กระบวนการนี้จะถูกทำซ้ำเป็นระยะๆ
แอมพลิจูดของการสั่นของร่างกาย คือขนาดของการเบี่ยงเบนมากที่สุดจากตำแหน่งสมดุล
ระยะเวลาการสั่น คือเวลาของการแกว่งที่สมบูรณ์ครั้งหนึ่ง เราสามารถพูดได้ว่าในช่วงเวลาที่ร่างกายเดินทางในเส้นทางที่มีแอมพลิจูดสี่แอมพลิจูด
ความถี่การสั่น เป็นส่วนกลับของงวด: . ความถี่วัดเป็นเฮิรตซ์ (Hz) และแสดงจำนวนการสั่นที่สมบูรณ์ที่เกิดขึ้นในหนึ่งวินาที
การสั่นสะเทือนแบบฮาร์มอนิก
เราจะถือว่าตำแหน่งของตัวสั่นถูกกำหนดโดยพิกัดเดียว ค่านี้สอดคล้องกับตำแหน่งสมดุล งานหลักของกลศาสตร์ในกรณีนี้คือการหาฟังก์ชันที่ให้พิกัดของร่างกายได้ตลอดเวลา
สำหรับคำอธิบายทางคณิตศาสตร์ของการแกว่ง เป็นเรื่องปกติที่จะใช้ฟังก์ชันคาบ มีฟังก์ชันดังกล่าวมากมาย แต่สองฟังก์ชันคือไซน์และโคไซน์ที่สำคัญที่สุด มีคุณสมบัติที่ดีมากมายและเกี่ยวข้องอย่างใกล้ชิดกับปรากฏการณ์ทางกายภาพที่หลากหลาย
เนื่องจากฟังก์ชันไซน์และโคไซน์ได้มาจากกันและกันโดยการเปลี่ยนอาร์กิวเมนต์ด้วย เราจึงสามารถจำกัดตัวเองไว้เพียงฟังก์ชันเดียวเท่านั้น เพื่อความชัดเจน เราจะใช้โคไซน์
การสั่นสะเทือนแบบฮาร์มอนิกเป็นการแกว่งซึ่งพิกัดขึ้นอยู่กับเวลาตามกฎฮาร์มอนิก:
(1)
ให้เราค้นหาความหมายของปริมาณที่รวมอยู่ในสูตรนี้
ค่าบวกคือค่าพิกัดที่ใหญ่ที่สุดในค่าสัมบูรณ์ (เนื่องจากค่าสูงสุดของโมดูลัสโคไซน์เท่ากับ 1) กล่าวคือ ค่าเบี่ยงเบนที่ใหญ่ที่สุดจากตำแหน่งสมดุล ดังนั้น - แอมพลิจูดของการแกว่ง
อาร์กิวเมนต์โคไซน์เรียกว่า เฟสความลังเล ค่าเท่ากับค่าของเฟสที่เรียกว่าเฟสเริ่มต้น ระยะเริ่มต้นสอดคล้องกับพิกัดเริ่มต้นของร่างกาย: .
เรียกว่าปริมาณ ความถี่วงจร. มาดูความเชื่อมโยงกับคาบการสั่นและความถี่กันดีกว่า การสั่นที่สมบูรณ์หนึ่งครั้งสอดคล้องกับการเพิ่มเฟสเท่ากับเรเดียน: , โดยเหตุใด
(2)
(3)
ความถี่วงจรวัดเป็น rad/s (เรเดียนต่อวินาที)
ตามนิพจน์ (2) และ (3) เราได้รับการบันทึกกฎฮาร์มอนิกอีกสองรูปแบบ (1) :
กราฟของฟังก์ชัน (1) ซึ่งแสดงการพึ่งพาพิกัดตรงเวลาระหว่างการแกว่งฮาร์มอนิกแสดงในรูปที่ 1 1.
กฎฮาร์มอนิกของรูปแบบ (1) มีลักษณะทั่วไปที่สุด มันตอบสนองเช่นสถานการณ์ที่มีการกระทำเริ่มต้นสองครั้งพร้อมกันกับลูกตุ้ม: พวกมันเบี่ยงเบนมันไปจำนวนหนึ่งและให้ความเร็วเริ่มต้นแก่มัน มีกรณีพิเศษที่สำคัญสองกรณีที่ไม่ได้ดำเนินการอย่างใดอย่างหนึ่ง
ปล่อยให้ลูกตุ้มถูกปฏิเสธ แต่ไม่มีการรายงานความเร็วเริ่มต้น (ถูกปล่อยโดยไม่มีความเร็วเริ่มต้น) เป็นที่ชัดเจนว่าในกรณีนี้เราจึงสามารถใส่ได้ เราได้กฎของโคไซน์:
กราฟของการออสซิลเลชันฮาร์มอนิกในกรณีนี้จะแสดงในรูปที่ 1 2.
 |
| ข้าว. 2. กฎของโคไซน์ |
ตอนนี้ให้เราสมมติว่าลูกตุ้มไม่ได้เบี่ยงเบนไป แต่ความเร็วเริ่มต้นนั้นถูกส่งไปจากตำแหน่งสมดุลโดยการกระแทก ในกรณีนี้คุณสามารถใส่. เราได้รับกฎของไซน์:
ตารางความผันผวนแสดงอยู่ในรูป 3.
 |
| ข้าว. 3. กฎของไซน์ |
สมการของการแกว่งฮาร์มอนิก
กลับไปที่กฎฮาร์มอนิกทั่วไป (1) . เรามาแยกสมการนี้กัน:
. (4)
ตอนนี้เราแยกความแตกต่างของความเท่าเทียมกันที่เกิดขึ้น (4) :
. (5)
ลองเปรียบเทียบนิพจน์ (1) สำหรับพิกัดและนิพจน์ (5) สำหรับการฉายภาพความเร่ง เราจะเห็นว่าการฉายภาพความเร่งแตกต่างจากพิกัดตามปัจจัยเท่านั้น:
. (6)
อัตราส่วนนี้เรียกว่า สมการฮาร์มอนิก. นอกจากนี้ยังสามารถเขียนใหม่ในรูปแบบนี้:
. (7)
จากมุมมองทางคณิตศาสตร์ สมการ (7) คือ สมการเชิงอนุพันธ์. การแก้สมการเชิงอนุพันธ์คือฟังก์ชัน (ไม่ใช่ตัวเลขเหมือนในพีชคณิตธรรมดา)
ดังนั้นจึงสามารถพิสูจน์ได้ว่า:
การแก้สมการ (7) คือฟังก์ชันใดๆ ของรูปแบบ (1) โดยพลการ ;
ไม่มีฟังก์ชันอื่นใดที่จะสามารถแก้สมการนี้ได้
กล่าวอีกนัยหนึ่ง ความสัมพันธ์ (6), (7) อธิบายการสั่นของฮาร์มอนิกด้วยความถี่ไซคลิกเท่านั้น ค่าคงที่สองตัวถูกกำหนดจากเงื่อนไขเริ่มต้น - โดยค่าเริ่มต้นของพิกัดและความเร็ว
ลูกตุ้มสปริง
ลูกตุ้มสปริง เป็นภาระที่ยึดอยู่กับสปริงซึ่งสามารถแกว่งไปในทิศทางแนวนอนหรือแนวตั้งได้
ให้เราค้นหาคาบของการสั่นแนวนอนเล็กน้อยของลูกตุ้มสปริง (รูปที่ 4) การแกว่งจะมีน้อยหากขนาดของการเสียรูปของสปริงน้อยกว่าขนาดของมันมาก สำหรับการเสียรูปเล็กน้อย เราสามารถใช้กฎของฮุคได้ สิ่งนี้จะนำไปสู่การสั่นแบบฮาร์โมนิค
เราละเลยแรงเสียดทาน โหลดมีมวลและความแข็งของสปริงเท่ากับ
พิกัดสอดคล้องกับตำแหน่งสมดุลที่สปริงไม่เสียรูป ดังนั้นขนาดของการเสียรูปของสปริงจึงเท่ากับโมดูลัสของพิกัดของโหลด
 |
| ข้าว. 4. ลูกตุ้มสปริง |
ในทิศทางแนวนอน เฉพาะแรงยืดหยุ่นจากสปริงเท่านั้นที่กระทำต่อโหลด กฎข้อที่สองของนิวตันสำหรับภาระในการฉายภาพบนแกนมีรูปแบบ:
. (8)
ถ้า (โหลดถูกเลื่อนไปทางขวาดังในรูป) แรงยืดหยุ่นจะหันไปในทิศทางตรงกันข้าม และ . ในทางกลับกัน ถ้า แล้ว มีเครื่องหมายและอยู่ตรงข้ามกันตลอดเวลา ดังนั้น กฎของฮุคจึงเขียนได้ดังนี้
จากนั้นความสัมพันธ์ (8) จะอยู่ในรูปแบบ:
เราได้รับสมการของการแกว่งฮาร์มอนิกในรูปแบบ (6) ซึ่งในนั้น
ความถี่ไซคลิกของการแกว่งของลูกตุ้มสปริงจึงเท่ากับ:
. (9)
จากที่นี่และจากอัตราส่วนเราจะพบคาบการสั่นในแนวนอนของลูกตุ้มสปริง:
. (10)
หากคุณแขวนตุ้มน้ำหนักไว้บนสปริง คุณจะได้ลูกตุ้มสปริงที่แกว่งไปในแนวตั้ง แสดงให้เห็นว่าในกรณีนี้ สูตร (10) ก็ใช้ได้สำหรับคาบการแกว่งเช่นกัน
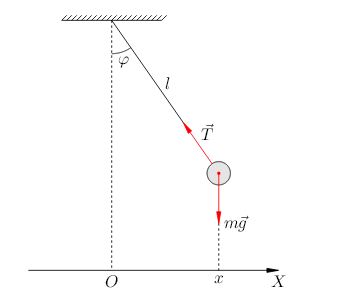
ลูกตุ้มทางคณิตศาสตร์
ลูกตุ้มคณิตศาสตร์ คือสิ่งเล็กๆ ห้อยอยู่บนเส้นด้ายที่ยืดไม่ออกไร้น้ำหนัก (รูปที่ 5) ลูกตุ้มทางคณิตศาสตร์สามารถแกว่งในระนาบแนวตั้งในสนามแรงโน้มถ่วงได้
 |
| ข้าว. 5. ลูกตุ้มทางคณิตศาสตร์ |
มาดูคาบการสั่นเล็กน้อยของลูกตุ้มทางคณิตศาสตร์กัน ความยาวของด้ายคือ. เราละเลยแรงต้านของอากาศ
ให้เราเขียนกฎข้อที่สองของนิวตันสำหรับลูกตุ้ม:
และฉายภาพลงบนแกน:
หากลูกตุ้มเข้าตำแหน่งดังในรูป (เช่น) ดังนั้น:
หากลูกตุ้มอยู่อีกด้านหนึ่งของตำแหน่งสมดุล (เช่น) ดังนั้น:
ดังนั้นสำหรับตำแหน่งใดๆ ของลูกตุ้ม เรามี:
. (11)
เมื่อลูกตุ้มอยู่นิ่งในตำแหน่งสมดุล ความเท่าเทียมกันก็จะเป็นที่น่าพอใจ สำหรับการแกว่งเล็กน้อย เมื่อความเบี่ยงเบนของลูกตุ้มจากตำแหน่งสมดุลมีขนาดเล็ก (เมื่อเทียบกับความยาวของเกลียว) ความเท่าเทียมกันโดยประมาณจะเป็นที่น่าพอใจ ลองใช้มันในสูตร (11):
นี่คือสมการของการแกว่งฮาร์มอนิกในรูปแบบ (6) ซึ่ง
ดังนั้น ความถี่วงจรของการแกว่งของลูกตุ้มทางคณิตศาสตร์จึงเท่ากับ:
. (12)
ดังนั้น คาบการสั่นของลูกตุ้มทางคณิตศาสตร์:
. (13)
โปรดทราบว่าสูตร (13) ไม่รวมมวลของน้ำหนักบรรทุก คาบการสั่นของลูกตุ้มทางคณิตศาสตร์ไม่เหมือนกับลูกตุ้มสปริง ระยะเวลาของการสั่นของลูกตุ้มทางคณิตศาสตร์ไม่ได้ขึ้นอยู่กับมวลของมัน
การสั่นสะเทือนแบบอิสระและแบบบังคับ
พวกเขาบอกว่าระบบทำ การสั่นสะเทือนฟรีถ้ามันหลุดออกจากตำแหน่งสมดุลแล้วปล่อยทิ้งไว้กับตัวมันเองในภายหลัง ไม่มีภายนอกเป็นระยะ
ในกรณีนี้ ระบบจะไม่ได้รับผลกระทบใดๆ และไม่มีแหล่งพลังงานภายในที่รองรับการแกว่งในระบบ
การแกว่งของสปริงและลูกตุ้มทางคณิตศาสตร์ที่กล่าวถึงข้างต้นเป็นตัวอย่างของการแกว่งอิสระ
ความถี่ที่เกิดการสั่นสะเทือนอิสระเรียกว่า ความถี่ธรรมชาติระบบสั่น ดังนั้น สูตร (9) และ (12) จึงให้ความถี่ธรรมชาติ (วงจร) ของการแกว่งของสปริงและลูกตุ้มทางคณิตศาสตร์
ในสถานการณ์อุดมคติที่ไม่มีแรงเสียดทาน การแกว่งอิสระจะไม่ทำให้หมาด ๆ นั่นคือพวกมันมีแอมพลิจูดคงที่และคงอยู่ตลอดไป ในระบบออสซิลเลเตอร์จริง แรงเสียดทานจะเกิดขึ้นเสมอ ดังนั้นการสั่นสะเทือนอิสระจะค่อยๆ หายไป (รูปที่ 6)
แรงสั่นสะเทือนที่ถูกบังคับ- สิ่งเหล่านี้เป็นการแกว่งที่เกิดขึ้นโดยระบบภายใต้อิทธิพลของแรงภายนอกที่เปลี่ยนแปลงเป็นระยะ ๆ เมื่อเวลาผ่านไป (ที่เรียกว่าแรงผลักดัน)
ให้เราสมมติว่าความถี่ธรรมชาติของการแกว่งของระบบเท่ากับ และแรงผลักดันขึ้นอยู่กับเวลาตามกฎฮาร์มอนิก:
เมื่อเวลาผ่านไป การสั่นแบบบังคับจะเกิดขึ้น: ระบบทำให้เกิดการเคลื่อนไหวที่ซับซ้อน ซึ่งเป็นการซ้อนทับของการสั่นแบบบังคับและอิสระ การสั่นแบบอิสระจะค่อยๆ หายไป และในสภาวะคงที่ ระบบจะทำการสั่นแบบบังคับ ซึ่งจะกลายเป็นฮาร์มอนิกด้วย ความถี่ของการสั่นแบบบังคับคงที่เกิดขึ้นพร้อมกับความถี่
แรงบังคับ (แรงภายนอกตามที่เคยเป็นมากำหนดความถี่ให้กับระบบ)
แอมพลิจูดของการสั่นแบบบังคับที่สร้างขึ้นนั้นขึ้นอยู่กับความถี่ของแรงขับเคลื่อน กราฟของการพึ่งพานี้จะแสดงในรูป 7.
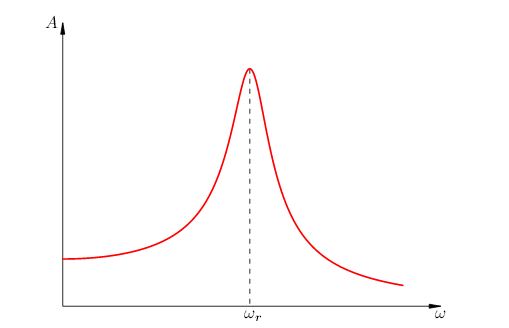 |
| ข้าว. 7. เสียงสะท้อน |
เราจะเห็นว่าเสียงสะท้อนเกิดขึ้นใกล้กับความถี่ - ปรากฏการณ์ของการเพิ่มขึ้นของแอมพลิจูดของการสั่นแบบบังคับ ความถี่เรโซแนนซ์จะเท่ากับความถี่ธรรมชาติของการสั่นของระบบโดยประมาณ: และความเท่าเทียมกันนี้จะแม่นยำยิ่งขึ้น ยิ่งแรงเสียดทานในระบบน้อยลง ในกรณีที่ไม่มีแรงเสียดทาน ความถี่เรโซแนนซ์จะเกิดขึ้นพร้อมกับความถี่ธรรมชาติของการแกว่ง และความกว้างของการแกว่งจะเพิ่มขึ้นเป็นอนันต์ที่